远程操作蛇形机器人的有效策略
动物一直是机器人系统的重要灵感来源,因为它们提供了引人入胜的自然例子,说明不同的身体结构如何产生特定的运动和运动风格。虽然大多数受动物启发的机器人的灵感来自有腿的动物物种,但一些机器人专家一直在探索机器人的潜力,其身体类似于其他动物(包括蛇)的身体。
蛇形机器人具有独特的特性,可以使它们比其他机器人更适合某些技术应用。例如,它们灵活的蛇形运动可以使它们有利于进行微创手术和内窥镜干预,通过鼻子进入患者的身体,然后到达目标区域。
尽管它们具有优势,但从远处操作这些机器人的现有方法并不是特别有效。这主要是因为虽然蛇形机器人是超冗余的(即它们具有大量或无限数量的自由度),但用于控制其运动的电子设备通常只允许用户指定六个自由度。
为了克服这一限制,汉诺威莱布尼茨大学的一组研究人员最近开发了一种新策略,用于直观和远程操作超冗余蛇形机器人的运动。这种策略在arXiv上预先发表的一篇论文中介绍,允许用户改变蛇形机器人的运动和方向,同时尽可能少地改变其形状。
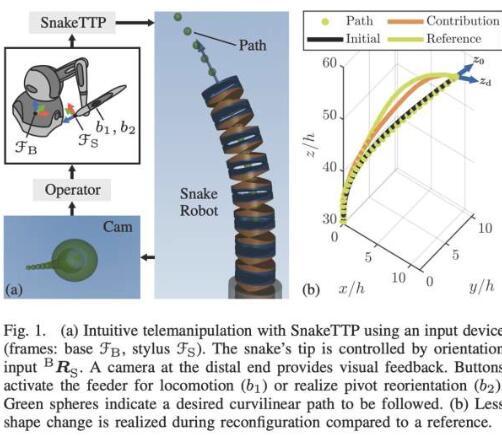
“本文介绍了SnakeTTP,这是一种用于直观远程操作的统一算法,可实现内窥镜任务的运动和枢轴重新定向,”Tim-Lukas Habich和他的同事在他们的论文中写道。“基于任务优先级逆运动学的新方法允许在最高优先级下进行不同的位置和方向规范,并在零空间内进行形状拟合。形状拟合是通过使用弗雷谢距离最大化两条曲线的相似性来执行的,同时指定末端执行器的位置和方向。
Habich和他的同事通过要求14名研究参与者控制模拟蛇形机器人的运动并将其带到模拟环境中的目标区域来评估他们的SnakeTTP算法。他们的结果非常有希望,因为控制模拟蛇形机器人的用户可以成功完成运动任务,并且还可以在目标区域内重新定向机器人的运动,同时尽可能少地改变其形状。
“与在当前和期望链接位置之间使用欧几里得距离的经典策略相比,基于Frechet距离的新颖形状拟合方法将形状误差降低了20.1%,”Habich和他的同事在他们的论文中写道。
虽然这组研究人员引入的新控制算法取得了有希望的结果,但到目前为止,它只在模拟机器人上进行了测试。未来在真实环境中的测试和使用真正的蛇形机器人可以进一步验证其有效性。
最终,该算法可以让研究人员更精确地控制蛇形机器人和其他超冗余机器人(例如,受章鱼触手启发的机器人),同时更好地复制蛇或触手般的运动。这反过来又可以促进这些机器人在医疗环境中的部署,特别是在人体内进行微创外科手术。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【经典句子大全】在日常生活中,无论是写作、演讲还是表达情感,一句经典的句子往往能起到画龙点睛的作用。它...浏览全文>>
-
【经典句句戳心的话】在生活的长河中,有些话虽然简单,却能直击人心,让人久久不能忘怀。这些句子往往蕴含着...浏览全文>>
-
【经典精辟句子】在日常生活中,我们常常会遇到一些让人深思、令人难忘的句子。这些句子简洁有力,富有哲理,...浏览全文>>
-
【经典惊悚片有哪些】惊悚片以其紧张的节奏、扣人心弦的情节和令人不安的氛围,成为电影史上最受欢迎的类型之...浏览全文>>
-
【经典教师简单自我介绍】在教育工作中,教师的自我介绍是展示个人风格、教学理念和职业态度的重要方式。一个...浏览全文>>
-
【经典简短句子一句话】在日常生活中,一句经典而简短的句子往往能给人留下深刻印象。它们简洁有力,蕴含深意...浏览全文>>
-
【禁不住念什么】在日常生活中,我们常常会遇到一些词语让人“禁不住”去读、去想,甚至去写。其中,“禁不住...浏览全文>>
-
【禁闭岛结局】《禁闭岛》(英文名:Shutter Island)是一部由马丁·斯科塞斯执导,莱昂纳多·迪卡普里奥主演...浏览全文>>
-
【禁闭岛的结局真相】《禁闭岛》(英文名:Shutter Island)是一部由马丁·斯科塞斯执导,莱昂纳多·迪卡普里...浏览全文>>
-
【靳字怎么读】在日常生活中,我们经常会遇到一些不常见的汉字,这些字不仅发音复杂,含义也常常让人感到困惑...浏览全文>>